Selected publications
My articles can also be found on my Google Scholar profile.
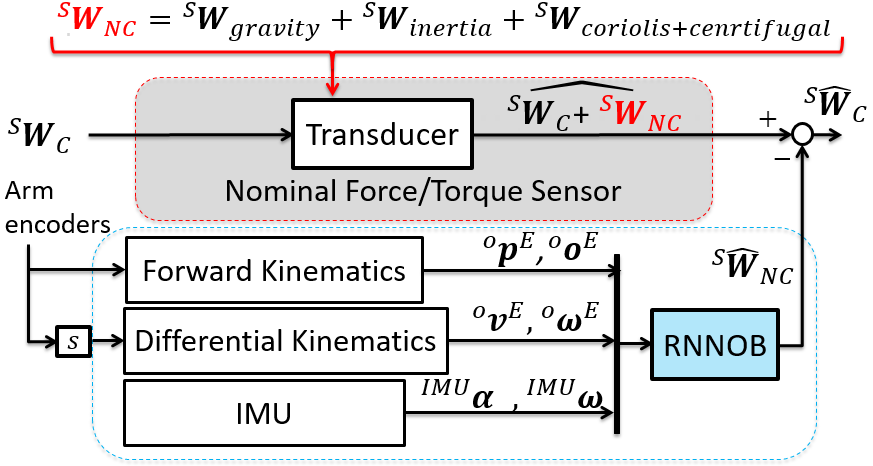
Force-Torque Sensor Disturbance Observer using Deep Learning
Kamal Mohy El Dine, Jose Sanchez, Juan Antonio Corrales, Youcef Mezouar, Jean-Christophe Fauroux
To appear in International Symposium on Experimental Robotics (ISER), 2018.
[PDF]
Abstract
Robots executing force controlled tasks require accurate perception of the applied force in order to guarantee safety. However, dynamic motions generate non-contact forces due to inertial forces. These non-contact forces can be regarded as disturbances to be removed such that only forces generated by contacts with the environment remain. This paper presents an observer based on recurrent neural networks that estimates the non-contact forces measured by a force-torque sensor attached at the end-effector of a robotic arm. The recurrent neural network observer uses signals from the joint encoders of the robotic arm and a low-cost inertial measurement unit to estimate the wrenches (i.e. forces and torques) generated due to gravity, inertia, centrifugal and Coriolis forces. The accuracy of the proposed observer is experimentally evaluated using a force-torque sensor attached to the end-effector of a seven degrees of freedom arm.
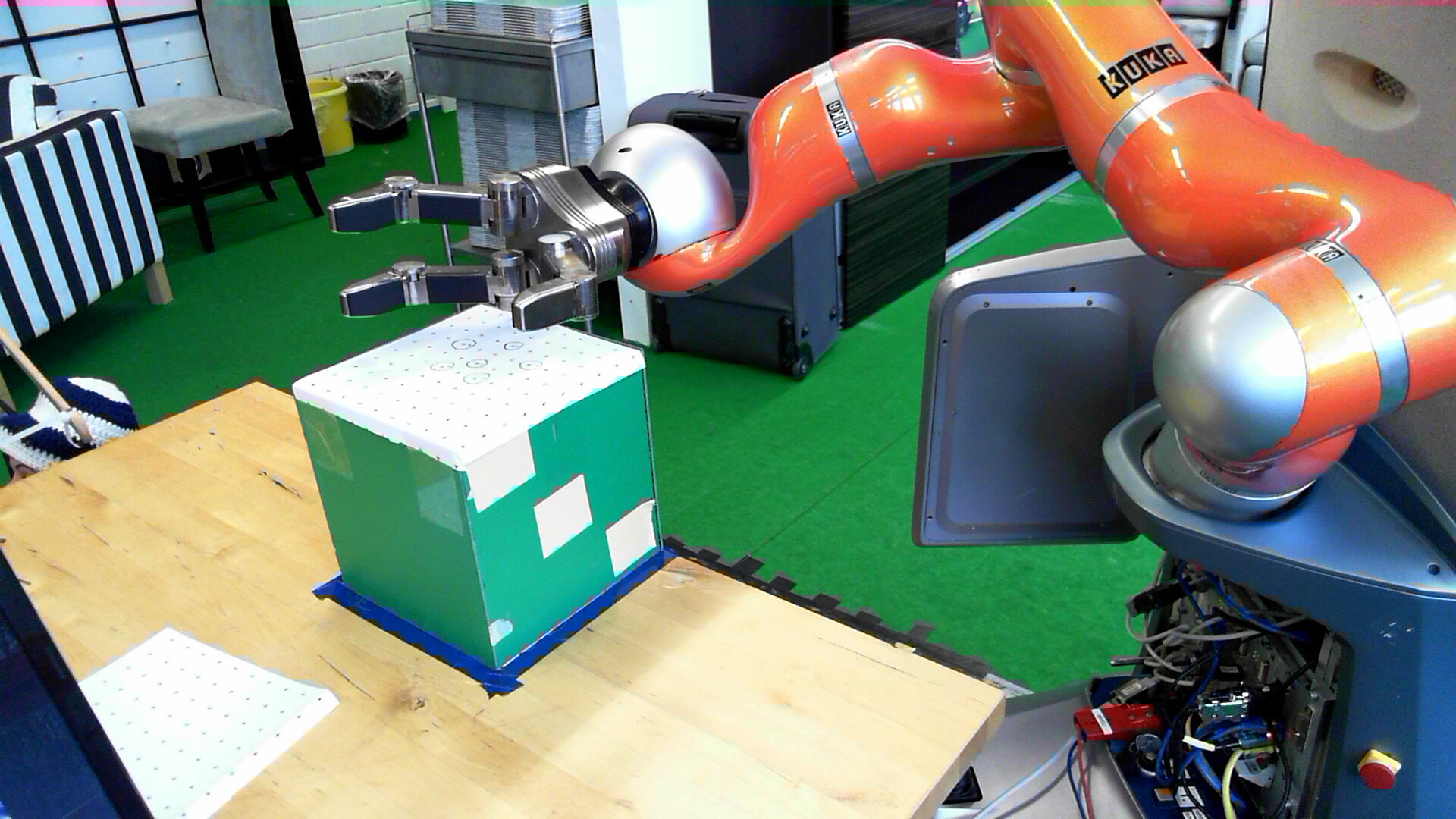
Online Shape Tracking based on Tactile Sensing and Deformation Modeling for Robot Manipulation
Jose Sanchez, Carlos M. Mateo, Juan Antonio Corrales, Belhassen-Chedli Bouzgarrou, Youcef Mezouar
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018.
[PDF]
Abstract
Precise robot manipulation of deformable objects requires an accurate and fast tracking of their shape as they deform. So far, visual sensing has been mostly used to solve this issue, but vision sensors are sensitive to occlusions, which might be inevitable when manipulating an object with robot. To address this issue, we present a modular pipeline to track the shape of a soft object in an online manner by coupling tactile sensing with a deformation model. Using a model of a tactile sensor, we compute the magnitude and location of a contact force and apply it as an external force to the deformation model. The deformation model then updates the nodal positions of a mesh that describes the shape of the deformable object. The proposed sensor model and pipeline, are evaluated using a Shadow Dexterous Hand equipped with BioTac sensors on its fingertips and an RGB-D sensor.
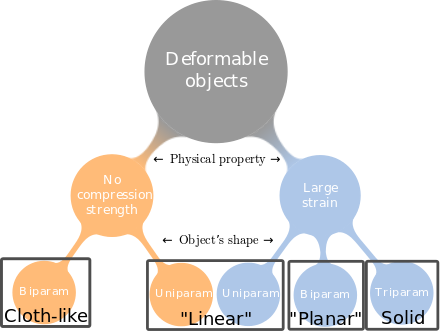
Robotic manipulation and sensing of deformable objects in domestic and industrial applications: a survey
Jose Sanchez, Juan Antonio Corrales, Belhassen-Chedli Bouzgarrou, Youcef Mezouar
The International Journal of Robotics Research (IJRR), 2018.
[PDF]
Abstract
We present a survey of recent work on robot manipulation and sensing of deformable objects, a field with relevant applications in diverse industries such as medicine (e.g. surgical assistance), food handling, manufacturing, and domestic chores (e.g. folding clothes). We classify the reviewed approaches into four categories based on the type of object they manipulate. Furthermore, within this object classification, we divide the approaches based on the particular task they perform on the deformable object. Finally, we conclude this survey with a discussion of the current state-of-the-art approaches and propose future directions within the proposed classification.

Context-Based Adaptation of In-Hand Slip Detection for Service Robots
Jose Sanchez, Sven Schneider, Nico Hochgeschwender, Gerhard K. Kraetzschmar, Paul G. Plöger
IFAC-PapersOnLine, 2016.
[PDF]
Abstract
Mobile manipulators are intended to be deployed in domestic and industrial environments where they will carry out tasks that require physical interaction with the surrounding world, for example, picking or handing over fragile objects. In-hand slippage, i.e. a grasped object moving within the robot’s grasp, is inherent to many of these tasks and thus, a robot’s ability to detect a slippage is vital for executing a manipulation task successfully. In this paper, we develop a slip detection approach which is based on the robot’s tactile sensors, a force/torque sensor and a combination thereof. The evaluation of our approach, carried out on the Care-O-bot 3 platform, highly suggests that the actions and motions performed by the robot during grasping should be taken into account during slip detection for improved performance. Based on this insight, we propose an in-hand slip detection architecture that is able to adapt to the current robot’s actions at run time.
Safely grasping with complex dexterous hands by tactile feedback
Jose Sanchez,Sven Schneider, Paul Plöger
Robot Soccer World Cup, 2015.
[PDF]
Abstract
Robots capable of assisting elderly people in their homes will become indispensable, since the world population is aging at an alarming rate. A crucial requirement for these robotic caregivers will be the ability to safely interact with humans, such as firmly grasping a human arm without applying excessive force. Minding this concern, we developed a reactive grasp that, using tactile sensors, monitors the pressure it exerts during manipulation. Our approach, inspired by human manipulation, employs an architecture based on different grasping phases that represent particular stages in a manipulation task. Within these phases, we implemented and composed simple components to interpret and react to the information obtained by the tactile sensors. Empirical results, using a Care-O-bot 3® with a Schunk Dexterous Hand (SDH-2), show that considering tactile information can reduce the force exerted on the objects significantly.